By Ahmed Fawzy Gad, Shaoni Mukherjee and James Skelton

Introduction
Object detection has come a long way in the field of computer vision, and one of the landmark innovations in this space is the Faster R-CNN model developed by researchers at Microsoft. This article takes a deep dive into the evolution, architecture, and impact of Faster R-CNN—a model that significantly improved the speed and accuracy of object detection by introducing a novel Region Proposal Network (RPN).
But to truly appreciate the elegance of Faster R-CNN, it’s important to first understand where it came from. That’s why we begin by revisiting its predecessors: R-CNN and Fast R-CNN. These earlier models laid the groundwork by demonstrating how convolutional neural networks (CNNs) could be leveraged for detecting objects in images. R-CNN introduced the concept of region-based feature extraction, while Fast R-CNN sped things up dramatically—but at the cost of relying on external region proposal methods like selective search.
Faster R-CNN addressed this bottleneck head-on by integrating the proposal generation step directly into the neural network through its RPN module. This allowed the model to perform both region proposal and object classification in a single, end-to-end trainable system—resulting in a faster and more efficient pipeline.
Throughout this article, we’ll break down each major component of the object detection pipeline, discuss how Faster R-CNN fits into that ecosystem, and explore key concepts such as anchors and feature sharing. We’ll also touch on training strategies, including alternating training and joint training, and finish with a brief look at Mask R-CNN, which builds upon Faster R-CNN to enable pixel-level segmentation.
Key takeaways:
- Faster R-CNN is a landmark two-stage object detection model that introduced an in-network Region Proposal Network (RPN) to generate candidate object regions, enabling much faster and more accurate detection compared to earlier R-CNN approaches which relied on external region proposal methods.
- Building on its predecessors R-CNN and Fast R-CNN, Faster R-CNN eliminated the bottleneck of slow region proposal (like selective search) by integrating proposal generation into the neural network, allowing end-to-end training and shared convolutional features for both proposing regions and classifying them.
- This architecture significantly improved the efficiency of object detection pipelines and laid the foundation for extensions like Mask R-CNN (which adds segmentation on top of detection), solidifying the two-stage detection paradigm as a balance of speed and precision in computer vision.
- The modular architecture makes it easy to fine-tune or extend for custom datasets, including multi-class or domain-specific detection tasks.
- Faster R-CNN strikes a balance between detection accuracy and inference speed, making it ideal for real-time or near-real-time applications.
- While Faster R-CNN sped up detection dramatically, later one-stage detectors like YOLO (“You Only Look Once”) took an alternate approach by doing detection in a single pass without a proposal stage, trading off a bit of accuracy for even greater real-time performance.
Prerequisites
To follow along with this article, you must have experience with Python code and a beginner’s understanding of Deep Learning. We assume that all readers have access to sufficiently powerful machines so they can run any code provided. Less powerful GPUs may also be used, but results may take longer to achieve.
If you do not have access to a GPU, we suggest using DigitalOcean GPU Droplets.
For instructions on getting started with Python code, we recommend trying this beginner’s guide to set up your system and prepare to run beginner tutorials.
Overview of the Object Detection Pipeline
Traditional object detection techniques follow the three major steps given in the figure below. The first step involves generating several region proposals, which are candidates that might have objects within them. The number of these regions is usually several thousand, e.g., 2,000 or more. Examples of some algorithms that generate region proposals are Selective Search and EdgeBoxes.
From each region proposal, a fixed-length feature vector is extracted using various image descriptors, like the histogram of oriented gradients (HOG). This feature vector is critical to the success of the object detectors. The vector should adequately describe an object even if it varies due to some transformation, like scale or translation.
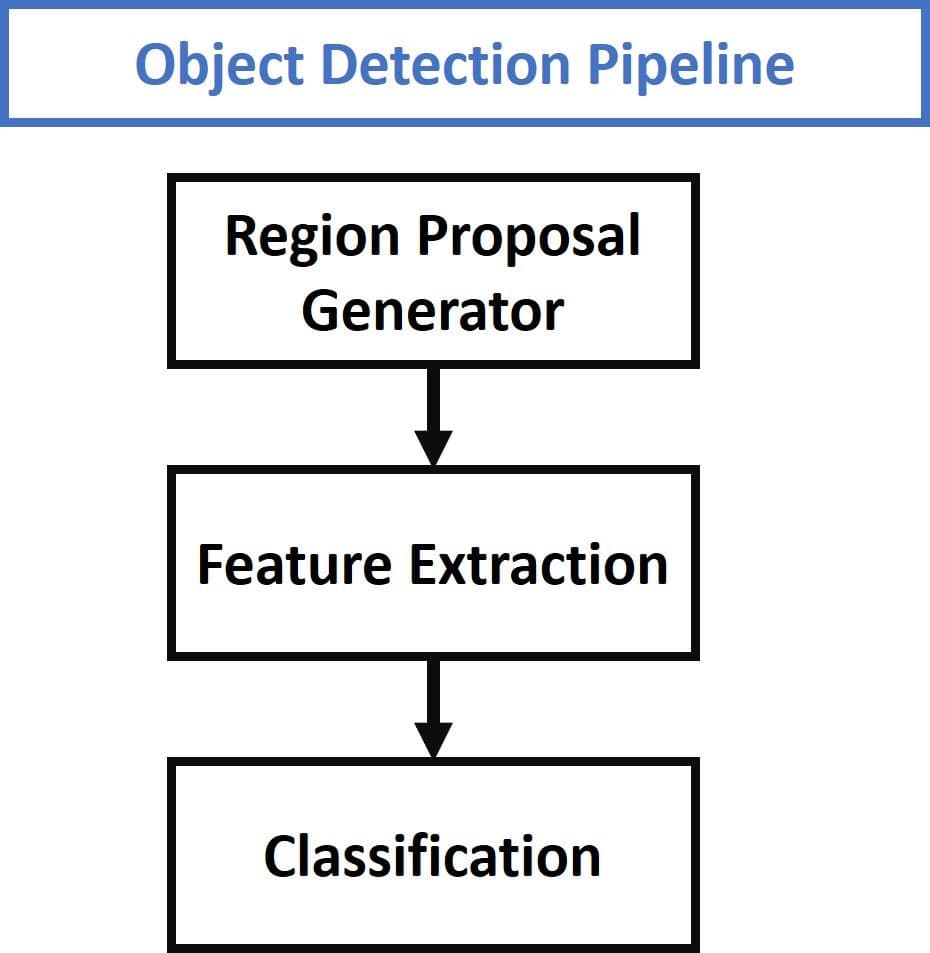
The feature vector is then used to assign each region proposal to either the background class or one of the object classes. As the number of classes increases, the complexity of building a model that can differentiate between all these objects increases. One of the popular models used for classifying the region proposals is the support vector machine (SVM).
This quick overview is enough to understand the basics of the region-based convolutional neural network (R-CNN).
R-CNN Quick Overview
In 2014, a group of researchers at UC Berkely developed a deep convolutional network called R-CNN (short for region-based convolutional neural network) that can detect 80 different types of objects in images.
Compared to the generic pipeline of the object detection techniques, the main contribution of R-CNN is just extracting the features based on a convolutional neural network (CNN). Other than this, everything is similar to the generic object detection pipeline. The following figure shows how the R-CNN model works.
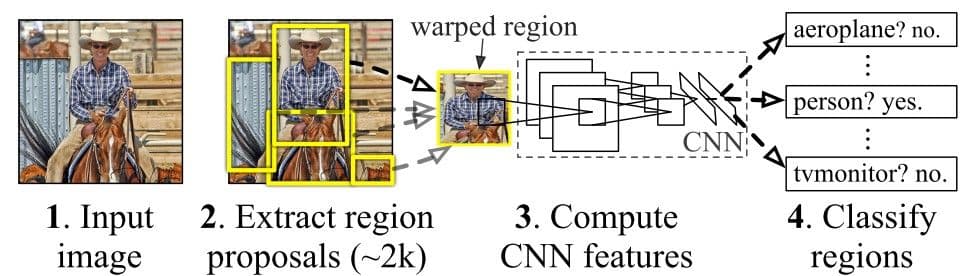
The R-CNN consists of 3 main modules:
- The first module generates 2,000 region proposals using the Selective Search algorithm.
- After being resized to a fixed, pre-defined size, the second module extracts a feature vector of length ,096 from each region proposal.
- The third module uses a pre-trained SVM algorithm to classify the region proposal to either the background or one of the object classes.
The R-CNN model has some drawbacks:
- It is a multi-stage model, where each stage is an independent component. Thus, it cannot be trained end-to-end.
- It caches the extracted features from the pre-trained CNN on the disk to later train the SVMs. This requires hundreds of gigabytes of storage.
- R-CNN depends on the Selective Search algorithm for generating region proposals, which takes a lot of time. Moreover, this algorithm cannot be customized to the detection problem.
- Each region proposal is fed independently to CNN for feature extraction, making it impossible to run R-CNN in real time.
As an extension of the R-CNN model, the Fast R-CNN model is proposed to overcome some limitations. A quick overview of Fast R-CNN is given in the next section.
Fast R-CNN Quick Overview
Fast R-CNN is an object detector that was developed solely by Ross Girshick, a Facebook AI researcher and a former Microsoft Researcher. Fast R-CNN overcomes several issues in R-CNN. As its name suggests, one advantage of the Fast R-CNN over R-CNN is its speed.
- Proposed a new layer called ROI Pooling that extracts equal-length feature vectors from all proposals (i.e., ROIs) in the same image.
- Compared to R-CNN, which has multiple stages (region proposal generation, feature extraction, and classification using SVM), Faster R-CNN builds a network that has only a single stage.
- Faster R-CNN shares computations (i.e., convolutional layer calculations) across all proposals (i.e., ROIs) rather than doing the calculations for each proposal independently. This is done by using the new ROI Pooling layer, which makes Fast R-CNN faster than R-CNN.
- Fast R-CNN does not cache the extracted features and thus does not need so much disk storage compared to R-CNN, which needs hundreds of gigabytes.
- Fast R-CNN is more accurate than R-CNN.
The general architecture of Fast R-CNN is shown below. The model consists of a single-stage, compared to the 3 stages in R-CNN. It just accepts an image as input and returns the class probabilities and bounding boxes of the detected objects.
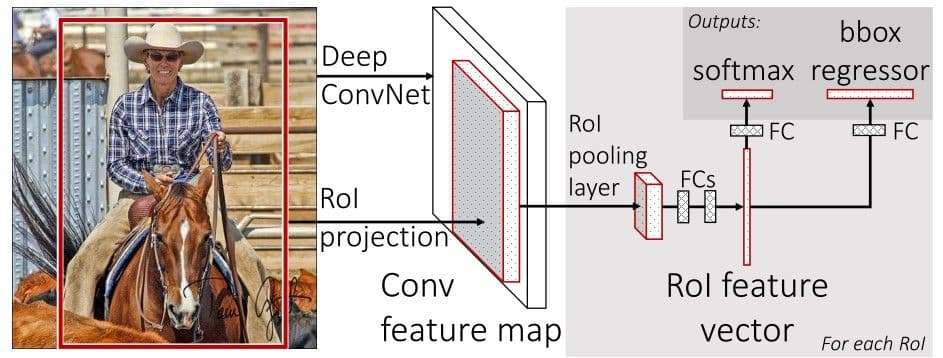
The feature map from the last convolutional layer is fed to an ROI Pooling layer. The reason is to extract a fixed-length feature vector from each region proposal. The GIF below shows how the ROI Pooling layer works.
Simply put, the ROI Pooling layer works by splitting each region proposal into a grid of cells. The max pooling operation is applied to each cell in the grid to return a single value. All values from all cells represent the feature vector. If the grid size is 2×2, then the feature vector length is.
The extracted feature vector using the ROI Pooling is then passed to some FC layers. The output of the last FC layer is split into two branches:
- Softmax layer to predict the class scores
- FC layer to predict the bounding boxes of the detected objects
In R-CNN, each region proposal is fed to the model independently from the other region proposals. This means that if a single region takes S seconds to be processed, then N regions take S*N seconds. The Fast R-CNN is faster than the R-CNN as it shares computations across multiple proposals.
For Faster R-CNN, the batch of 128 regions may be selected from just two images (6 regions per image). When regions are sampled from the same image, then their convolutional layer computations are shared, and this reduces the time. So, the processing time drops to 2*S. However, sampling multiple regions from the same image degrades the performance as all regions are correlated.
Despite the advantages of the Fast R-CNN model, there is a critical drawback as it depends on the time-consuming Selective Search algorithm to generate region proposals. The Selective Search method cannot be customized for a specific object detection task. Thus, it may not be accurate enough to detect all target objects in the dataset.
Faster R-CNN
As its name suggests, Faster R-CNN is faster than Fast R-CNN thanks to the region proposal network (RPN).
Main Contributions
The main contributions in this paper are described below:
- Proposing region proposal network (RPN) which is a fully convolutional network that generates proposals with various scales and aspect ratios. The RPN implements the terminology of neural network with attention to tell the object detection (Fast R-CNN) where to look.
- Rather than using pyramids of images (i.e., multiple instances of the image but at different scales) or pyramids of filters (i.e., multiple filters with different sizes), this paper introduced the concept of anchor boxes. An anchor box is a reference box of a specific scale and aspect ratio. With multiple reference anchor boxes, multiple scales and aspect ratios exist for the single region. This can be thought of as a pyramid of reference anchor boxes. Each region is then mapped to each reference anchor box, thus detecting objects at different scales and aspect ratios.
- The convolutional computations are shared across the RPN and the Fast R-CNN. This reduces the computational time.
The architecture of Faster R-CNN is shown in the next figure. It consists of 2 modules:
- RPN: For generating region proposals.
- Fast R-CNN: For detecting objects in the proposed regions.
The RPN module is responsible for generating region proposals. It applies the concept of attention in neural networks, so it guides the Fast R-CNN detection module to where to look for objects in the image.
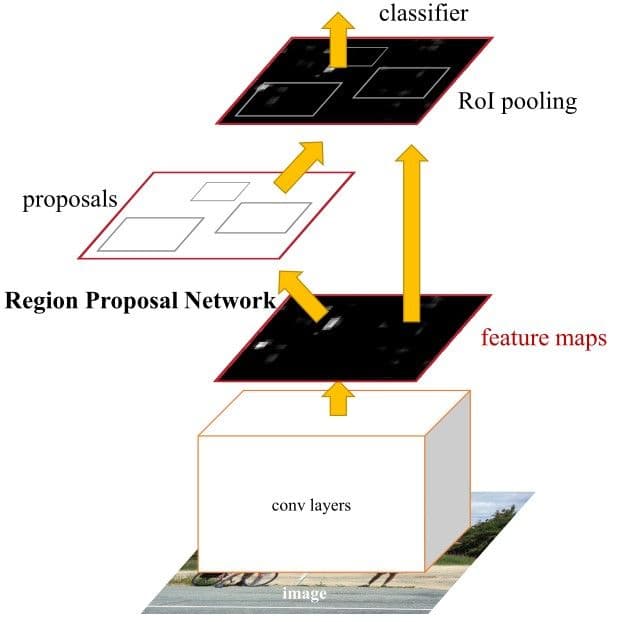
Note how the convolutional layers (e.g., computations) are shared across both the RPN and the Fast R-CNN modules.
The Faster R-CNN works as follows:
- The RPN generates region proposals.
- For all region proposals in the image, a fixed-length feature vector is extracted from each region using the ROI Pooling layer.
- The extracted feature vectors are then classified using the Fast R-CNN.
- The class scores of the detected objects, in addition to their bounding boxes, are returned.
Region Proposal Network (RPN)
The R-CNN and Fast R-CNN models depend on the Selective Search algorithm for generating region proposals. Each proposal is fed to a pre-trained CNN for classification. This paper proposed a network called the region proposal network (RPN) that can produce region proposals. This has some advantages:
- The region proposals are now generated using a network that could be trained and customized according to the detection task.
- Because the proposals are generated using a network, this can be trained end-to-end to be customized for the detection task. Thus, it produces better region proposals compared to generic methods like Selective Search and EdgeBoxes.
- The RPN processes the image using the same convolutional layers used in the Fast R-CNN detection network. Thus, the RPN does not take extra time to produce the proposals compared to the algorithms like Selective Search.
- Due to sharing the same convolutional layers, the RPN and the Fast R-CNN can be merged/unified into a single network. Thus, training is done only once.
The RPN works on the output feature map returned from the last convolutional layer shared with the Fast R-CNN. This is shown in the next figure. Based on a rectangular window of size nxn, a sliding window passes through the feature map. For each window, several candidate region proposals are generated. These proposals are not the final proposals as they will be filtered based on their “objectness score” (explained below).
Anchor
According to the next figure, the feature map of the last shared convolution layer is passed through a rectangular sliding window of size nxn, where n=3 for the VGG-16 net. For each window, K region proposals are generated. Each proposal is parametrized according to a reference box, which is called an anchor box. The two parameters of the anchor boxes are:
- Scale
- Aspect Ratio
Generally, there are 3 scales and 3 aspect ratios, and thus there is a total of K=9 anchor boxes. But K may be different than 9. In other words, K regions are produced from each region proposal, where each of the K regions varies in either the scale or the aspect ratio. Some of the anchor variations are shown in the next figure.
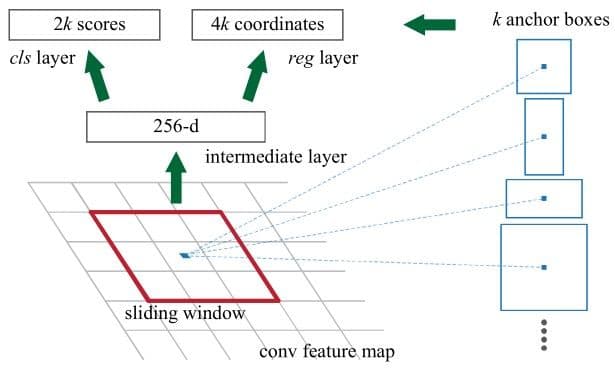
Using reference anchors (i.e. anchor boxes), a single image at a single scale is used while offering scale-invariant object detectors, as the anchors exist at different scales. This avoids using multiple images or filters. The multi-scale anchors are key to sharing features across the RPN and the Fast R-CNN detection network.
For each n×n region proposal, a feature vector (of length 256 for the ZF net and 512 for the VGG-16 net) is extracted. This vector is then fed to 2 sibling fully-connected layers:
- The first FC layer is named cls, and represents a binary classifier that generates the objectness score for each region proposal (i.e., whether the region contains an object, or is part of the background).
- The second FC layer is named re,g, which returns a 4-D vector defining the region’s bounding box.
The first FC layer (i.e., binary classifier) has two outputs. The first classifies the region as a background, and the second classifies the region as an object. The next section discusses how the objectness score is assigned to each anchor and how it produces the classification label.
Objectness Score
The cls layer outputs a vector of 2 elements for each region proposal. If the first element is one and the second element is 0, then the region proposal is classified as background. If the second element is one and the first element is 0, then the region represents an object.
For training the RPN, each anchor is given a positive or negative objectness score based on the Intersection-over-Union (IoU).
The IoU is the ratio between the area of intersection between the anchor box and the ground-truth box to the area of union of the two boxes. The IoU ranges from 0.0 to 1.0. When there is no intersection, the IoU is 0.0. As the two boxes get closer to each other, the IoU increases until reaching 1.0 (when the two boxes are 100% identical).
The next four conditions use the IoU to determine whether a positive or a negative objectness score is assigned to an anchor:
- An anchor with an IoU overlap higher than 0.7 with any ground-truth box is given a positive objectness label.
- If there is no anchor with an IoU overlap higher than 0.7, then assign a positive label to the anchor(s) with the highest IoU overlap with a ground-truth box.
- A negative objectness score is assigned to a non-positive anchor when the IoU overlap for all ground-truth boxes is less than 0.3. A negative objectness score means the anchor is classified as background.
- Anchors that are neither positive nor negative do not contribute to the training objective.
Assume there are 3 region proposals associated with 3 anchors, where their IoU scores with 3 ground-truth boxes are listed below. Because there is an anchor with an IoU score of 0.9, which is higher than 0.7, it is assigned a positive objectness score with that ground-truth box, and a negative score to all other boxes.
0.9, 0.55, 0.1
Here is the result of classifying the anchors:
positive, negative, negative
The second condition means that when no anchor has an IoU overlap score higher than 0.7, then search for the anchor with the highest IoU and assign it a positive objectness score. It is expected that the maximum IoU score is less than or equal to 0.7, but the confusing part is that the paper did not mention a minimum value of the IoU score.
It is expected that the minimum value should be 0.5. So, if an anchor box has an IoU score that is greater than 0.5 but less than or equal to 0.7, then assign it a positive objectness score.
Assume that the IoU scores of an anchor are listed below. Because the highest IoU score is the second one, with a value of 0.55, it falls under the second condition. Thus, it is assigned a positive objectness score.
0.2, 0.55, 0.1
Here is the result of classifying the anchors:
negative, positive, negative
The third condition specifies that when the IoU scores of an anchor with all ground-truth boxes are less than 0.3, then this anchor is assigned a negative objectness score. For the next IoU scores, the anchor is given a negative score for the 3 cases because all of the IoU scores are less than 0.3.
0.2, 0.25, 0.1
Here is the result of classifying the anchors:
negative, negative, negative
According to the fourth condition, when an anchor has an IoU score that is greater than or equal to 0.3 but less than or equal to 0.5, it is neither classified as positive nor negative. This anchor is not used to train the classifier.
For the following IoU scores, the anchor is not assigned any label, as all of the scores are between 0.3 and 0.5 (inclusive).
0.4, 0.43, 0.45
The next equation summarizes the four conditions.

Note that the first condition (0.7 < IoU) is usually sufficient to label an anchor as positive (i.e., contains an object), but the authors preferred to mention the second condition (0.5 < IoU <= 0.7) for the rare cases where there is no region with an IoU of 0.7.
Feature Sharing between RPN and Fast R-CNN
The 2 modules in the Fast R-CNN architecture, namely the RPN and Fast R-CNN, are independent networks. Each of them can be trained separately. In contrast, for Faster R-CNN it is possible to build a unified network in which the RPN and Fast R-CNN are trained at once.
The core idea is that both the RPN and Fast R-CNN share the same convolutional layers. These layers exist only once but are used in the two networks. It is possible to call it layer sharing or feature sharing. Remember that the anchors are what makes it possible to share the features/layers between the two modules in the Faster R-CNN.
Training Faster R-CNN
The Faster R-CNN paper mentioned three different ways to train both the RPN and Fast R-CNN while sharing the convolutional layers:
- Alternating Training
- Approximate Joint Training
- Non-Approximate Joint Training
Alternating Training
The first method is called alternating training, in which the RPN is first trained to generate region proposals. The weights of the shared convolutional layers are initialized based on a pre-trained model on ImageNet. The other weights of the RPN are initialized randomly.
After the RPN produces the boxes of the region proposals, the weights of both the RPN and the shared convolutional layers are tuned.
The generated proposals by the RPN are used to train the Fast R-CNN module. In this case, the weights of the shared convolutional layers are initialized with the tuned weights by the RPN. The other Fast R-CNN weights are initialized randomly. While the Fast R-CNN is trained, both the weights of Fast R-CNN and the shared layers are tuned. The tuned weights in the shared layers are again used to train the RPN, and the process repeats.
According to alternating training is the preferred way to train the two modules and is applied in all experiments.
Approximate Joint Training
The second method is called approximate joint training, in which both the RPN and Fast R-CNN are regarded as a single network, not two separate modules. In this case, the region proposals are produced by the RPN.
Without updating the weights of either the RPN or the shared layers, the proposals are fed directly to the Fast R-CNN, which detects the objects’ locations. Only after the Fast R-CNN produces its outputs are the weights in the Faster R-CNN tuned.
Because the weights of the RPN and the shared layers are not updated after the region proposals are generated, the weights’ gradients with respect to the region proposals are ignored. This reduces the accuracy of this method compared to the first method (even if the results are close). On the other hand, the training time is reduced by about 25-50%.
Non-Approximate Joint Training
In the approximate joint training method, an RoI Warping layer is used to allow the weights’ gradients with respect to the proposed bounding boxes to be calculated.
Drawbacks
One drawback of Faster R-CNN is that the RPN is trained using all anchors in the mini-batch, of size 256, extracted from a single image. Because all samples from a single image may be correlated (i.e., their features are similar), the network may take a lot of time to reach convergence.
Mask R-CNN
As an extension to Faster R-CNN, the Mask R-CNN model includes another branch that returns a mask for each detected object.

FAQ’s
Q: Faster R-CNN vs YOLO: which object detection model to choose in 2025?
A: Choose Faster R-CNN when accuracy is paramount and inference speed is secondary, particularly for applications like medical imaging, quality control, or autonomous vehicles where precision matters most. YOLO is extremely fast and can be applied to use cases such as self-driving cars and video surveillance with high accuracy, especially with natural images. Faster R-CNN typically achieves 2-5% higher mAP scores but runs 2-3x slower than YOLO. Choose YOLO for real-time applications like video surveillance, live streaming analysis, or mobile applications. For 2025 applications, consider YOLOv8/v9 for speed or Faster R-CNN with modern backbones for maximum accuracy.
Q: How to improve Faster R-CNN performance for small object detection?
A: Improving Faster R-CNN for small object detection requires several optimization strategies: Use Feature Pyramid Networks (FPN) to capture multi-scale features, implement smaller anchor sizes in the RPN configuration, increase input image resolution during training and inference, apply data augmentation techniques like mixup and mosaic, use focal loss to handle class imbalance, and implement cascade detection for iterative refinement. Additionally, consider using modern backbones like EfficientNet or ResNeXt, implement deformable convolutions for better feature alignment, and use soft-NMS instead of traditional NMS for better small object recall.
Q: What are the hardware requirements for training Faster R-CNN models?
A: Training Faster R-CNN models requires substantial computational resources: minimum 16GB GPU memory (RTX 4080/A100 recommended), 32GB+ system RAM, modern multi-core CPU (Intel i7/AMD Ryzen 7+), and fast SSD storage for dataset loading. For large datasets or high-resolution images, consider 24GB+ GPU memory (RTX 4090/A6000). Training time varies from days to weeks depending on dataset size and hardware. Cloud solutions like AWS P3/P4 instances or Google Cloud TPUs can accelerate training. Multi-GPU setups significantly reduce training time through distributed training frameworks like Horovod or PyTorch DistributedDataParallel.
Q: How to deploy Faster R-CNN models for production inference?
A: Deploying Faster R-CNN for production requires optimization for speed and efficiency: Convert models to optimized formats like TensorRT, ONNX, or OpenVINO for faster inference. Implement model quantization to reduce memory usage and increase speed. Use batching to process multiple images simultaneously. Deploy on appropriate hardware (GPUs for high throughput, edge devices for low latency). Implement caching strategies for frequent queries. Use containerization with Docker for consistent deployment. Consider edge deployment with TensorRT or mobile optimization with TensorFlow Lite for resource-constrained environments.
Q: What are the latest improvements to Faster R-CNN architecture in 2025?
A: Recent Faster R-CNN improvements in 2025 include integration with Vision Transformers as backbone networks, implementation of deformable attention mechanisms, advanced augmentation strategies like CutMix and AutoAugment, improved anchor-free adaptations, and better handling of class imbalance through focal loss variants. Modern implementations also feature improved multi-scale training, better feature pyramid designs, and integration with self-supervised pre-training. These enhancements provide 10-15% performance improvements over baseline Faster R-CNN while maintaining the core two-stage detection paradigm.
Conclusion
This article reviewed a deep convolutional neural network used for object detection called Faster R-CNN, which accurately detects and classifies objects in images. The article started by reviewing the generic steps of any object detection model. It then quickly reviewed how the R-CNN and Fast R-CNN models work in order to have an idea of what challenges Faster R-CNN is conquering.
Faster R-CNN is a single-stage model that is trained end-to-end. It uses a novel region proposal network (RPN) for generating region proposals, which save time compared to traditional algorithms like Selective Search. It uses the ROI Pooling layer to extract a fixed-length feature vector from each region proposal.
While Faster R-CNN brought a major breakthrough in object detection by embedding region proposal generation into the network itself, it does have a few limitations. One such drawback is that during training, all anchors in a mini-batch are typically sampled from a single image. This can lead to highly correlated samples, slowing down convergence due to limited variability in the training data.
That said, Faster R-CNN remains a cornerstone of modern object detection systems. Its robust and efficient architecture laid the groundwork for future models, such as Mask R-CNN, which extends its capabilities by adding pixel-level instance segmentation for each detected object.
If you’re looking to experiment with or deploy Faster R-CNN at scale, platforms like DigitalOcean GPU Droplets offer the high-performance computing power needed for training deep learning models efficiently. With scalable infrastructure and support for popular ML frameworks, it’s easier than ever to bring your computer vision projects to life.
References
- Girshick, Ross, et al. “Rich feature hierarchies for accurate object detection and semantic segmentation.” Proceedings of the IEEE conference on computer vision and pattern recognition. 2014.
- Girshick, Ross. “Fast r-cnn.” Proceedings of the IEEE international conference on computer vision. 2015.
- Ren, Shaoqing, et al. “Faster r-cnn: Towards real-time object detection with region proposal networks.” Advances in neural information processing systems. 2015.
- He, Kaiming, et al. “Mask r-cnn.” Proceedings of the IEEE international conference on computer vision. 2017.
Thanks for learning with the DigitalOcean Community. Check out our offerings for compute, storage, networking, and managed databases.
About the author(s)
With a strong background in data science and over six years of experience, I am passionate about creating in-depth content on technologies. Currently focused on AI, machine learning, and GPU computing, working on topics ranging from deep learning frameworks to optimizing GPU-based workloads.
Still looking for an answer?
This textbox defaults to using Markdown to format your answer.
You can type !ref in this text area to quickly search our full set of tutorials, documentation & marketplace offerings and insert the link!
 This work is licensed under a Creative Commons Attribution-NonCommercial- ShareAlike 4.0 International License.
This work is licensed under a Creative Commons Attribution-NonCommercial- ShareAlike 4.0 International License.
Become a contributor for community
Get paid to write technical tutorials and select a tech-focused charity to receive a matching donation.

DigitalOcean Documentation
Full documentation for every DigitalOcean product.

Resources for startups and AI-native businesses
The Wave has everything you need to know about building a business, from raising funding to marketing your product.
The developer cloud
Scale up as you grow — whether you're running one virtual machine or ten thousand.

Start building today
From GPU-powered inference and Kubernetes to managed databases and storage, get everything you need to build, scale, and deploy intelligent applications.
