
The Role of GPUs in Deep Learning
GPU computing has transformed industries, enabling applied deep learning advancements in autonomous vehicles, robotics, and molecular biology. The high-speed parallel processing capabilities offered by these machines accelerate the matrix multiplication computations required for processing and transforming massive amounts of data to train and make predictions (inference) with deep learning models comprised of layers of interconnected nodes (neural networks).
Training these neural networks and performing inference faster and cheaper is a high priority in AI research and development. With respect to GPU computing, this means understanding how to better optimize GPU performance.
Key Points
- GPU optimization is essential for faster deep learning training and efficient resource usage.
- Batch size, mixed precision, and data pipelines directly impact performance.
- CUDA, cuDNN, and optimized frameworks help maximize GPU potential.
- Profiling tools like NVIDIA Nsight Systems and PyTorch Profiler help identify bottlenecks.
- Memory management techniques (gradient checkpointing, model pruning) reduce GPU strain.
- Scaling with multiple GPUs and distributed training enhances efficiency for larger models.
Prerequisites
Familiarity with the following will help with understanding the topics presented in this article:
- Machine learning (ML) & deep learning basics (matrix multiplication, neural networks, Python, PyTorch)
- Data types (INT, FP, etc.)
- Recent NVIDIA GPU architectures: Blackwell (announced, but not yet available), Hopper (2022), Ampere (2020)
- CUDA and the GPU memory hierarchy
Introduction to GPU Optimization
The goal of this article is to give readers the insight they need to improve their computing experience. Those keen on optimizing GPU performance are advised to learn about the features of the latest GPU architectures, understand the GPU programming language landscape, and gain familiarity with performance monitoring tools like NVIDIA Nsight and SMI. Experimenting, benchmarking, and iterating through GPU optimizations are critical for achieving better utilization of the hardware.
Harnessing the Hardware Features of NVIDIA GPUs
Knowledge of the intricacies of GPU architectures can improve your intuition around programming massively parallel processors. Throughout successive GPU iterations, NVIDIA has introduced a number of specialized hardware features to accelerate its parallel processing capabilities.
Tensor Cores
By default, many deep learning libraries (PyTorch) train with single precision (FP32). However, single precision isn’t always necessary for achieving optimal accuracy. Lower precision requires less memory, increasing the speed at which data can be accessed (memory bandwidth).
Tensor Cores enable mixed-precision computing, where FP32 is used only when necessary and the lowest precision data type that doesn’t compromise accuracy is used. There are currently five generations of Tensor Cores, with the fourth generation in the Hopper architecture and the fifth generation in the Blackwell architecture.
| Tensor Core | Data Type introduced |
|---|---|
| Volta (first generation) | FP16, FP32 |
| Ampere (third generation) | Sparsity, INT8, INT4, FP64, BF16, TF32 |
| Hopper (fourth generation) | FP8 |
| Blackwell (fifth generation) | FP4 |
Transformer Engine
The Transformer Engine is a library that allows for 8-bit floating point (FP8) precision on Hopper GPUs. The introduction of FP8 precision in Hopper GPUs improved performance over FP16 without compromising accuracy. The second-generation Transformer Engine will be in the Blackwell architecture, allowing for FP4 precision.
Tensor Memory Accelerator
The Tensor Memory Accelerator (TMA) allows for asynchronous memory transfer between the GPU’s global and shared memory. Prior to the TMA, multiple threads and warps would work together to copy data. In contrast, with the TMA, a single thread in the thread block can issue a TMA instruction for asynchronous handling of the copy operation.
GPUs Are Programmable
Now, consider this: Does hardware design influence the CUDA language? Or does the CUDA language motivate hardware design? Both are true. This relationship between hardware and software is well-described in the 2022 GTC talk, How CUDA Programming Works where Stephen Jones explains that the CUDA language evolved to make the physics of the hardware more programmable.
CUDA
CUDA (Compute Unified Device Architecture) is a parallel computing platform designed to configure GPUs. CUDA supports C, C++, Fortran, and Python among other programming languages.
CUDA Libraries
There are a multitude of libraries built on top of CUDA to extend its functionality. Some notable ones include:
- cuBLAS: a GPU-accelerated basic linear algebra (BLAS) library capable of accelerating low and mixed-precision matrix multiplication.
- cuDNN (CUDA Deep Neural Network): a library that provides implementations of operations that appear frequently in DNN applications, such as convolution, attention, matrix multiplication, pooling, tensor transformation functions, etc.
- CUTLASS (CUDA Templates for Linear Algebra Subroutines): a library that supports mixed-precision computing with optimized operations for various data types, including floating-point (FP16 to FP64), integer (4/8-bit), and binary (1-bit). It utilizes NVIDIA’s Tensor Cores for high-throughput matrix multiplication.
- CuTe (CUDA Templates): a header-only C++ library that offers Layout and Tensor templates. These abstractions encapsulate essential information about the data such as type, shape, memory location, and organization, while also enabling intricate indexing operations.
Triton
Triton is a python-based language and compiler for parallel programming. Phil Tillet, the creator of Triton, explains in this video that the language was designed to address the limitations of GPU programming with respect to CUDA and existing domain-specific languages (DSLs).
While highly effective, CUDA is often a bit too complex to just jump into for researchers and practitioners without specialized GPU programming experience. This complexity not only impedes communication between GPU experts and ML researchers but also hinders the rapid iteration required to accelerate development in compute-intensive fields.
Additionally, existing DSLs are restrictive. They lack support for custom data structures and control over parallelization strategies and resource allocation.
Triton strikes a balance by allowing its users to define and manipulate tensors in SRAM and modify them with the use of torch-like operators, while still providing the flexibility to implement custom parallelization and resource management strategies. Triton helps democratize GPU programming by making it possible to write efficient GPU code without extensive CUDA experience.
Leveraging the Memory Hierarchy
GPUs possess multiple memory types, with different sizes and speeds. The inverse relationship between memory size and speed is the basis behind the GPU memory hierarchy. Strategically allocating variables to different CUDA memory types gives developers more control over their program’s performance. The specified memory type impacts the variable’s scope (confined to a single thread, shared within thread blocks, etc.) and the speed at which it’s accessed. Variables stored in high-speed memory, like registers or shared memory, can be more quickly retrieved than variables stored in slower memory types such as global memory.
 FlashAttention is an example of a hardware-aware algorithm that exploits the memory hierarchy.
FlashAttention is an example of a hardware-aware algorithm that exploits the memory hierarchy.
What does GPU Performance even mean?
Performance evaluation in GPU computing depends on the intended use case. That being said, key metrics used to assess overall efficiency include latency and throughput.
Latency refers to the time delay between request and response. In the context of our favourite parallel processor, request is when the GPU receives a command for processing and response is when processing is complete and the result is returned.
Throughput is the number of units the GPU processes per second. This metric reflects the GPU’s processing capacity to handle multiple tasks in parallel. GPU architects and developers strive to minimize latency and maximize throughput.
These metrics are often looked at when benchmarking GPUs. For instance, the study, Benchmarking and Dissecting the Nvidia Hopper GPU Architecture, benchmarks Hopper GPUs with latency and throughput tests for different memory units, Tensor Cores, and new CUDA programming features introduced with Hopper (DPX, asynchronous data movement, and distributed shared memory).
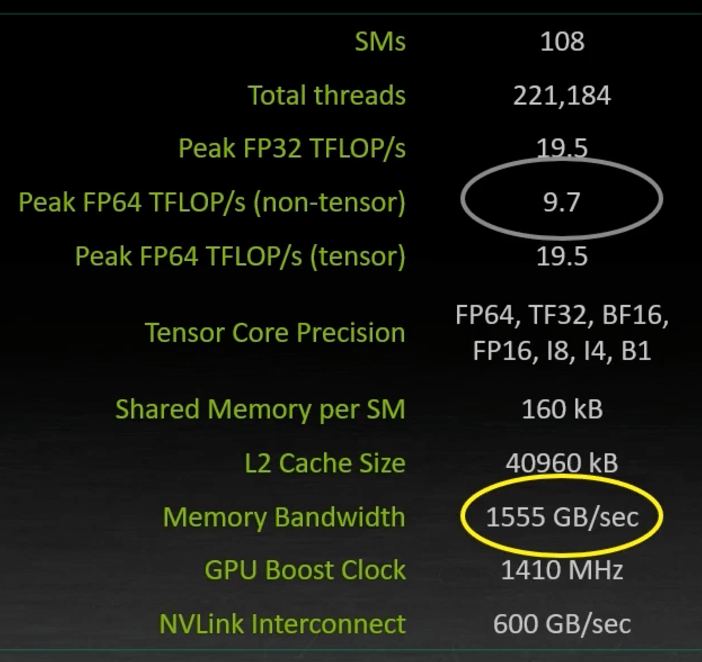
From Stephen Jones’ 2022 GTC talk How CUDA Programming Works: Floating Point Operations Per Second (FLOPS) are often cited as a performance measure, but they’re rarely the limiting factor. GPUs typically have an abundance of floating-point computational power and therefore, other aspects like memory bandwidth prove to be more significant bottlenecks.
Performance Monitoring Tools
GPU performance monitoring allows developers and system administrators to identify bottlenecks (is the job memory-bound, latency-bound, or compute-bound?), effectively allocate GPU resources, prevent overheating, manage power consumption, and make informed decisions about hardware upgrades. NVIDIA provides two powerful tools for GPU monitoring: Nsight and SMI.
NVIDIA’s Nsight
The NVIDIA Nsight Systems is a system-wide performance analysis tool that allows visualization of an application’s algorithm and identification of areas for optimization. Additional information on NVIDIA NSight Compute can be found in the kernel profiling guide.
NVIDIA’s System Management Interface
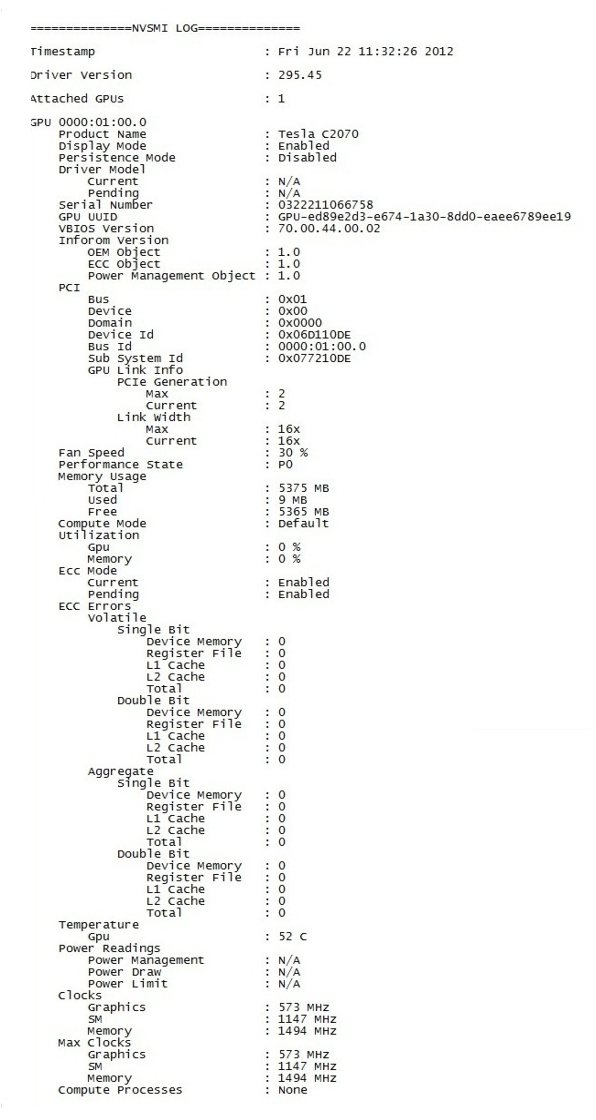
The NVIDIA System Management Interface (nvidia-smi) is a command-line tool, built on the NVIDIA Management Library, for managing and monitoring GPU devices. Additional information can be found in the nvidia-smi documentation.
Example nvidia-smi output:
Frequently Asked Questions (FAQs)
1. Why is GPU optimization important for deep learning?
Deep learning models often require billions of parameters and massive datasets. Without optimization, training can take days or even weeks, leading to high costs and slower experimentation. Optimizing GPU usage helps reduce training time, improve accuracy, and make better use of available resources. This is especially useful for researchers, startups, and companies looking to innovate faster.
2. What are some common techniques to optimize GPU performance?
Key optimization techniques for deep learning include adjusting batch sizes to maximize GPU utilization (while balancing memory limits), applying mixed precision training with FP16 to accelerate computations and reduce memory usage, and building efficient data pipelines that handle preprocessing and loading in advance. Additionally, caching and prefetching strategies help ensure the GPU always has data ready to process. Together, these methods keep GPUs fully engaged in computation rather than idling during slower tasks like data loading, ultimately improving both speed and efficienc
3. What role do CUDA and cuDNN play in GPU optimization?
CUDA is NVIDIA’s parallel computing platform that allows deep learning frameworks like TensorFlow and PyTorch to leverage GPUs. cuDNN is a GPU-accelerated library specifically for deep learning operations (like convolutions, pooling, and normalization). By using CUDA and cuDNN, models run significantly faster compared to CPUs or non-optimized GPU code.
4. How can I identify performance bottlenecks in my deep learning workflow?
Bottlenecks can occur at multiple levels—data loading, memory usage, or computation. Tools like NVIDIA Nsight Systems, NVIDIA Nsight Compute, TensorBoard, or PyTorch Profiler help visualize training workloads. They can highlight whether the GPU is underutilized (due to slow data pipelines) or if memory is being wasted on inefficient operations.
5. What are some GPU memory optimization techniques?
Proven techniques for managing limited GPU memory include gradient checkpointing, which conserves memory by recomputing intermediate values instead of storing them, and model pruning or quantization, which shrink model size with minimal impact on accuracy. Additionally, switching from FP32 to more efficient data types like FP16 reduces the overall memory footprint. Together, these strategies make it possible to fit larger models into constrained GPU resources while minimizing the risk of out-of-memory errors.
6. How does multi-GPU and distributed training improve performance?
When training on very large datasets or models, a single GPU might not be sufficient. Multi-GPU training splits data across GPUs, allowing parallel computation. Distributed training goes further by scaling workloads across multiple servers with GPUs. This approach speeds up training, enables handling larger models, and reduces time-to-results.
7. Can I optimize GPU performance without owning expensive hardware?
Yes! Cloud providers like DigitalOcean Gradient™ AI GPU Droplets offer flexible access to high-performance GPUs (such as NVIDIA A100 or H100). This means you only pay for the GPU time you use, making it cost-effective for startups, researchers, or individuals who don’t want to invest in expensive on-premise GPUs. It’s a scalable solution that makes optimization accessible to everyone.
Conclusion
This article is by no means conclusive on all there is to GPU optimization, but rather an introduction to the topic.
Optimizing GPU performance for deep learning is about more than just faster training—it’s about making the most of available hardware to improve efficiency, scalability, and cost-effectiveness. From fine-tuning batch sizes and memory usage to leveraging mixed precision and efficient data pipelines, these techniques can have a significant impact on how smoothly and effectively your models train and deploy.
For developers and researchers, the right infrastructure plays a crucial role in enabling these optimizations. DigitalOcean Gradient™ AI GPU Droplets provide on-demand, high-performance GPUs designed for AI and machine learning workloads. Whether you’re experimenting with small-scale projects or running large-scale training, GPU Droplets give you the flexibility to apply performance optimization techniques without being held back by infrastructure limitations.
By combining best practices in GPU optimization with the simplicity and scalability of DigitalOcean’s cloud platform, you can accelerate your deep learning projects, reduce costs, and focus more on innovation.
References
NVIDIA Blogs/Documentation
- https://blogs.nvidia.com/blog/difference-deep-learning-training-inference-ai/
- https://docs.nvidia.com/deeplearning/performance/dl-performance-matrix-multiplication/index.html
- https://www.nvidia.com/en-us/data-center/tensor-cores/
- https://docs.nvidia.com/deeplearning/performance/mixed-precision-training/index.html
- https://docs.nvidia.com/deeplearning/transformer-engine/user-guide/index.html
- https://developer.nvidia.com/gpu-accelerated-libraries
- https://developer.nvidia.com/cublas
- https://developer.nvidia.com/cudnn
- https://github.com/NVIDIA/cutlass
- https://resources.nvidia.com/en-us-nsight-developer-tools/improving-gpu-performance-by-reducing-instruction
- https://developer.nvidia.com/system-management-interface
Papers
- Benchmarking and Dissecting the Nvidia Hopper GPU Architecture
- A Case Study in CUDA Kernel Fusion: Implementing FlashAttention-2 on NVIDIA Hopper Architecture using the CUTLASS Library
- FlashAttention: Fast and Memory-Efficient Exact Attention with IO-Awareness
Some Excellent Resources
- Programming Massively Parallel Processors (4th edition)
- GPU Mode youtube channel and discord server (previously called CUDA Mode)
- Blog Post by Tim Dettmers: Which GPU(s) to Get for Deep Learning: My Experience and Advice for Using GPUs in Deep Learning
- THE TRITON LANGUAGE | PHILIPPE TILLET
- GPU optimization shared note
- CUTLASS Tutorial:Mastering the NVIDIA® Tensor Memory Accelerator (TMA)
- How CUDA Programming Works
- FreeCodeCamp course by Elliot Arledge:CUDA Programming Course – High-Performance Computing with GPUs
Thanks for learning with the DigitalOcean Community. Check out our offerings for compute, storage, networking, and managed databases.
About the author
Melani is a Technical Writer at DigitalOcean based in Toronto. She has experience in teaching, data quality, consulting, and writing. Melani graduated with a BSc and Master’s from Queen's University.
Still looking for an answer?
This textbox defaults to using Markdown to format your answer.
You can type !ref in this text area to quickly search our full set of tutorials, documentation & marketplace offerings and insert the link!
 This work is licensed under a Creative Commons Attribution-NonCommercial- ShareAlike 4.0 International License.
This work is licensed under a Creative Commons Attribution-NonCommercial- ShareAlike 4.0 International License.
Become a contributor for community
Get paid to write technical tutorials and select a tech-focused charity to receive a matching donation.

DigitalOcean Documentation
Full documentation for every DigitalOcean product.

Resources for startups and AI-native businesses
The Wave has everything you need to know about building a business, from raising funding to marketing your product.
The developer cloud
Scale up as you grow — whether you're running one virtual machine or ten thousand.

Start building today
From GPU-powered inference and Kubernetes to managed databases and storage, get everything you need to build, scale, and deploy intelligent applications.
