By Nouman

Introduction
In this article, we will build one of the earliest convolutional neural networks ever introduced, LeNet5. We will build this CNN from scratch in PyTorch and see how it performs on a real-world dataset.
We will start by exploring LeNet5’s architecture. We will then load and analyze our dataset, MNIST, using the class provided by Torchvision. Using PyTorch, we will build LeNet5 from scratch and train it on our data. Finally, we will see how the model performs on the unseen test data.
Prerequisites
Knowledge of neural networks will help you understand this article. This translates to being familiar with the different layers of neural networks (input layer, hidden layers, output layer), activation functions, optimization algorithms (variants of gradient descent), loss functions, etc. Additionally, familiarity with Python syntax and the PyTorch library is essential for understanding the code snippets presented in this article.
An understanding of CNNs is also recommended. This includes knowledge of convolutional layers, pooling layers, and their role in extracting features from input data. Understanding concepts like stride, padding, and the impact of kernel/filter size is beneficial.
LeNet5
LeNet5 is used to recognize handwritten characters. Yann LeCun and others proposed it in 1998 in the paper Gradient-Based Learning Applied to Document Recognition.
Let’s understand the architecture of LeNet5 as shown in the figure below:
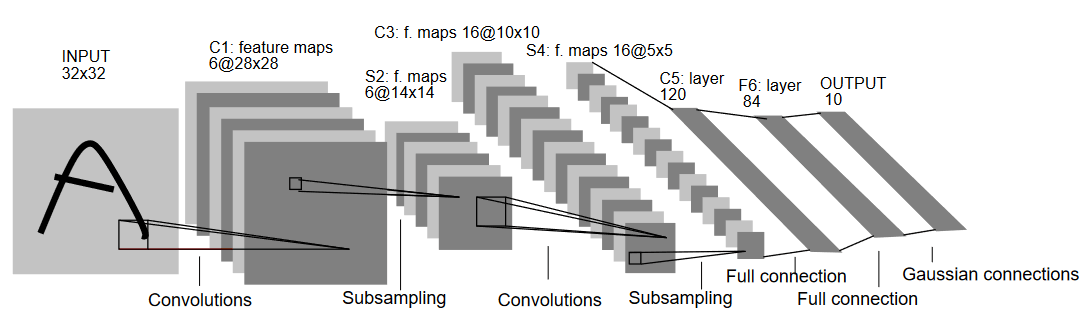
As the name indicates, LeNet5 has five layers: two convolutional and three fully connected. Let’s start with the input. LeNet5 accepts a greyscale image of 32x32 as input, indicating that the architecture is not suitable for RGB images (multiple channels). So, the input image should contain just one channel. After this, we start with our convolutional layers.
The first convolutional layer has a filter size of 5x5 with six such filters. This will reduce the width and height of the image while increasing the depth (number of channels). The output would be 28x28x6. After this, pooling is applied to decrease the feature map by half, i.e., 14x14x6. The same filter size (5x5) with 16 filters is now applied to the output, followed by a pooling layer. This reduces the output feature map to 5x5x16.
A convolutional layer with a size of 5x5 and 120 filters is then applied to transform the feature map into 120 values. Following this, there is the first fully connected layer, which contains 84 neurons. Finally, the output layer consists of 10 neurons, corresponding to the 10 classes representing the numerical digits in the MNIST dataset.
Data Loading
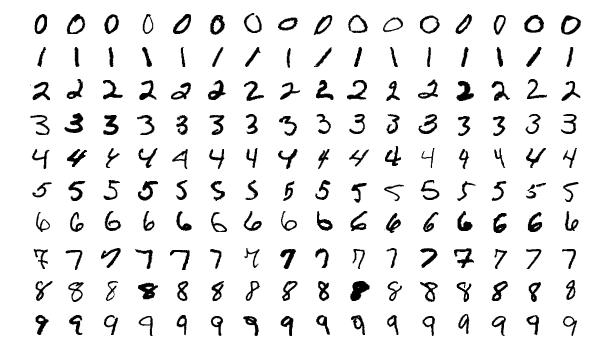
Let’s start by loading and analyzing the data. We will be using the MNIST dataset. The MNIST dataset contains images of handwritten numerical digits. The images are greyscale, all with a size of 28x28, and are composed of 60,000 training and 10,000 testing images.
You can see some of the sample images below:
Importing the Libraries
Let’s start by importing the required libraries and defining some variables (hyperparameters and device are also detailed to help the package determine whether to train on GPU or CPU):
# Load in relevant libraries, and alias where appropriate
import torch
import torch.nn as nn
import torchvision
import torchvision.transforms as transforms
# Define relevant variables for the ML task
batch_size = 64
num_classes = 10
learning_rate = 0.001
num_epochs = 10
# Device will determine whether to run the training on GPU or CPU.
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
Loading and Transforming the Data
Using torchvision, we will load the dataset, allowing us to perform any pre-processing steps easily.
#Loading the dataset and preprocessing
train_dataset = torchvision.datasets.MNIST(root = './data',
train = True,
transform = transforms.Compose([
transforms.Resize((32,32)),
transforms.ToTensor(),
transforms.Normalize(mean = (0.1307,), std = (0.3081,))]),
download = True)
test_dataset = torchvision.datasets.MNIST(root = './data',
train = False,
transform = transforms.Compose([
transforms.Resize((32,32)),
transforms.ToTensor(),
transforms.Normalize(mean = (0.1325,), std = (0.3105,))]),
download=True)
train_loader = torch.utils.data.DataLoader(dataset = train_dataset,
batch_size = batch_size,
shuffle = True)
test_loader = torch.utils.data.DataLoader(dataset = test_dataset,
batch_size = batch_size,
shuffle = True)
Let’s understand the code:
- Firstly, the MNIST data can’t be used as it is for the LeNet5 architecture. The LeNet5 architecture accepts the input to be 32x32 and the MNIST images are 28x28. We can fix this by resizing the images, normalizing them using the pre-calculated mean and standard deviation (available online), and finally storing them as tensors.
- We set download=True in case the data has not already been downloaded.
- Next, we make use of data loaders. This might not affect the performance in the case of a small dataset like MNIST, but it can really impede the performance in the case of large datasets and is generally considered a good practice. Data loaders allow us to iterate through the data in batches, and the data is loaded while iterating and not at once at the start.
- We specify the batch size and shuffle the dataset when loading so that every batch has some variance in the types of labels it has. This will increase the efficacy of our eventual model.
LeNet5 from Scratch
Let’s first look at the code:
#Defining the convolutional neural network
class LeNet5(nn.Module):
def __init__(self, num_classes):
super(ConvNeuralNet, self).__init__()
self.layer1 = nn.Sequential(
nn.Conv2d(1, 6, kernel_size=5, stride=1, padding=0),
nn.BatchNorm2d(6),
nn.ReLU(),
nn.MaxPool2d(kernel_size = 2, stride = 2))
self.layer2 = nn.Sequential(
nn.Conv2d(6, 16, kernel_size=5, stride=1, padding=0),
nn.BatchNorm2d(16),
nn.ReLU(),
nn.MaxPool2d(kernel_size = 2, stride = 2))
self.fc = nn.Linear(400, 120)
self.relu = nn.ReLU()
self.fc1 = nn.Linear(120, 84)
self.relu1 = nn.ReLU()
self.fc2 = nn.Linear(84, num_classes)
def forward(self, x):
out = self.layer1(x)
out = self.layer2(out)
out = out.reshape(out.size(0), -1)
out = self.fc(out)
out = self.relu(out)
out = self.fc1(out)
out = self.relu1(out)
out = self.fc2(out)
return out
Defining the LeNet5 Model
I’ll explain the code linearly:
- In PyTorch, we define a neural network by creating a class that inherits from nn.Module, that contains many of the methods that we will need to use.
- There are two main steps after that. First is initializing the layers that we are going to use in our CNN inside __init__ , and the other is to define the sequence in which those layers will process the image. This is defined inside the forward function.
- For the architecture itself, we first define the convolutional layers using the nn.Conv2D function with the appropriate kernel size and the input/output channels. We also apply max pooling using nn.MaxPool2D function. The nice thing about PyTorch is that we can combine the convolutional layer, activation function, and max pooling into one single layer (they will be separately applied, but it helps with organization) using the nn.Sequential function.
- Then we define the fully connected layers. Note that we can use nn.Sequential here as well and combine the activation functions and the linear layers, but I wanted to show that either one is possible.
- Finally, our last layer outputs 10 neurons, which are our final predictions for the digits.
Setting Hyperparameters
Before training, we need to set some hyperparameters, such as the loss function and the optimizer to be used.
model = LeNet5(num_classes).to(device)
#Setting the loss function
cost = nn.CrossEntropyLoss()
#Setting the optimizer with the model parameters and learning rate
optimizer = torch.optim.Adam(model.parameters(), lr=learning_rate)
#this is defined to print how many steps are remaining when training
total_step = len(train_loader)
We begin by initializing our model with the number of classes as an argument, which is set to 10 in this case. Next, we define our cost function as cross-entropy loss and choose the Adam optimizer. While there are various options available for both, these choices generally yield good results with the model and the data provided. Finally, we establish a `total_step` variable to help track the steps more effectively during training.
Model Training
Now, we can train our model:
total_step = len(train_loader)
for epoch in range(num_epochs):
for i, (images, labels) in enumerate(train_loader):
images = images.to(device)
labels = labels.to(device)
#Forward pass
outputs = model(images)
loss = cost(outputs, labels)
#Backward and optimize
optimizer.zero_grad()
loss.backward()
optimizer.step()
if (i+1) % 400 == 0:
print ('Epoch [{}/{}], Step [{}/{}], Loss: {:.4f}'.format(epoch+1, num_epochs, i+1, total_step, loss.item()))
Let’s see what the code does:
- We start by iterating through the number of epochs, and then the batches in our training data.
- We convert the images and the labels according to the device we are using, i.e., GPU or CPU.
- In the forward pass, we make predictions using our model and calculate the loss based on those predictions and our actual labels.
- Next, we do the backward pass, where we update our weights to improve our model.
- We then set the gradients to zero before every update using the optimizer.zero_grad() function.
- Then, we calculate the new gradients using the loss.backward() function.
- And finally, we update the weights with the optimizer.step() function.
We can see the output as follows:
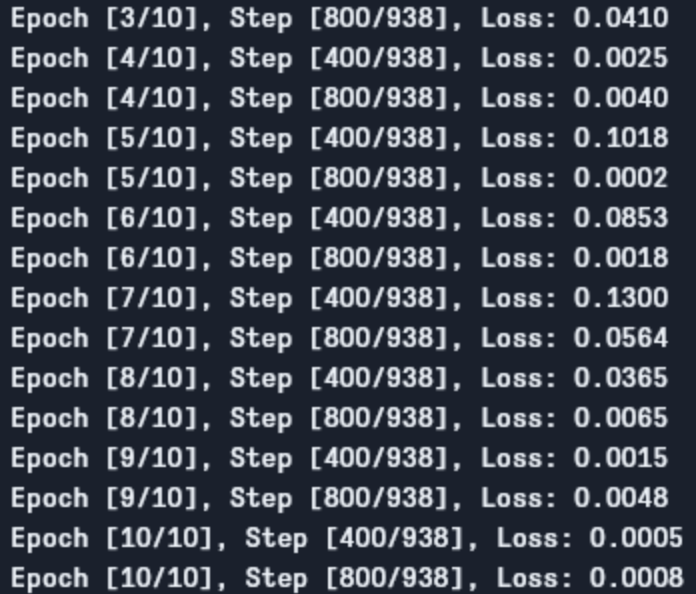
The loss is decreasing with each epoch, indicating that our model is effectively learning. It’s important to note that this loss is calculated on the training set. However, if the loss is excessively low (as we are observing), it could be a sign of overfitting. There are several methods to address this issue, such as regularization and data augmentation, but we won’t delve into those solutions in this article. Now, let’s test our model to evaluate its performance.
Model Testing
Let’s now test our model:
# Test the model
# In the test phase, we don't need to compute gradients (for memory efficiency)
model.eval() # Set the model to evaluation mode
with torch.no_grad():
correct = 0
total = 0
for images, labels in test_loader:
images = images.to(device)
labels = labels.to(device)
outputs = model(images)
_, predicted = torch.max(outputs.data, 1)
total += labels.size(0)
correct += (predicted == labels).sum().item()
accuracy = 100 * correct / total
print(f'Accuracy of the network on the 10000 test images: {accuracy:.2f} %')
As you can see, the code is not so different than the one for training. The only difference is that we are not computing gradients (using with torch.no_grad()), and also not computing the loss because we don’t need to backpropagate here. To compute the resulting accuracy of the model, we can simply calculate the total number of correct predictions over the total number of images.
Using this model, we get around 98.8% accuracy, which is quite good:

Testing Accuracy
Note that the MNIST dataset is quite basic and small for today’s standards, and similar results are hard to get for other datasets. Nonetheless, it’s a good starting point when learning deep learning and CNNs.
Conclusion
In this article, we took a deep dive into LeNet-5, one of the foundational convolutional neural networks that laid the groundwork for modern deep learning in computer vision. We began by understanding the architecture of LeNet-5, breaking down each layer and its role in feature extraction and classification.
We then introduced the MNIST dataset—a benchmark for handwritten digit recognition—and demonstrated how to load and preprocess it using torchvision, to make sure it’s ready for training.
From there, we implemented the LeNet-5 architecture from scratch in PyTorch, carefully defining each layer and specifying the hyperparameters necessary for training. This included setting learning rates, batch sizes, optimizers, and loss functions, all of which play a crucial role in the model’s performance.
Finally, we trained and evaluated the model on the MNIST dataset. The network achieved strong accuracy on the test set, confirming that even a relatively simple CNN like LeNet-5 can be highly effective for digit classification tasks.
Through this hands-on walkthrough, you’ve learned not only how to build and train LeNet-5 in PyTorch but also gained insights into the inner workings of CNNs, data handling, and model evaluation. This foundation will serve you well as you explore more advanced architectures and tackle more complex image recognition problems in the future.
Thanks for learning with the DigitalOcean Community. Check out our offerings for compute, storage, networking, and managed databases.
About the author
Still looking for an answer?
This textbox defaults to using Markdown to format your answer.
You can type !ref in this text area to quickly search our full set of tutorials, documentation & marketplace offerings and insert the link!
 This work is licensed under a Creative Commons Attribution-NonCommercial- ShareAlike 4.0 International License.
This work is licensed under a Creative Commons Attribution-NonCommercial- ShareAlike 4.0 International License.
Become a contributor for community
Get paid to write technical tutorials and select a tech-focused charity to receive a matching donation.

DigitalOcean Documentation
Full documentation for every DigitalOcean product.

Resources for startups and AI-native businesses
The Wave has everything you need to know about building a business, from raising funding to marketing your product.
The developer cloud
Scale up as you grow — whether you're running one virtual machine or ten thousand.

Start building today
From GPU-powered inference and Kubernetes to managed databases and storage, get everything you need to build, scale, and deploy intelligent applications.
